








-
加速器驱动次临界系统(Accelerator Driven Sub-critical System, ADS)是国际公认的最有前景的长寿命核废料安全处理手段[1-2]。正在建设的加速器驱动嬗变研究装置(China initiative Accelerator Driven System, CiADS) 将是国际上首个ADS 高功率实验装置[3]。CiADS装置包括强流超导直线加速器、高功率散裂靶和次临界反应堆,本文研究CiADS装置中加速器束流强度的控制技术。
在加速器、散裂靶、反应堆耦合运行时,束流强度的调节非常重要。由于次临界堆没有采用控制棒组件,反应堆功率只能通过调节质子加速器的束流强度或者束流功率来控制。CiADS装置耦合运行时,当散裂靶温度高于工作范围值或者反应堆温度高于工作范围值,只能通过降低质子加速器的束流强度来保持装置的运行。因此,本文研究CiADS装置耦合运行时束流强度的自动控制技术。
-
CiADS加速器包括离子源、低能传输段、射频四极加速器、中能传输段、超导加速段以及高能传输段等。束流从离子源出来进入低能传输段时经过一个挡束可调光阑[4],该挡束可调光阑由两个圆柱体组成,每个圆柱体上有一系列半圆的孔径,两个圆柱体合起来组成一个圆型孔径。当驱动电机带动两个圆柱体转动时,可调光阑形成不同直径的圆型孔径。因此,转动可调光阑圆柱体的角度可以改变可调光阑的圆孔直径,从而调节加速器的束流强度。本节介绍如何利用比例-积分-微分(Proportion Integral Differential, PID) 控制器自动转动可调光阑角度来调节束流强度。
-
由于结构简单和实用性强,PID控制器是业界内最普遍采用的控制器。PID控制器由下列比例项、积分项和微分项三个基本增益项组成:
$$ u\left(t\right)={K}_{\mathrm{p}}e\left(t\right)+{K}_{\mathrm{i}}{\int }_{0}^{\mathrm{t}}e\left(\tau \right)\mathrm{d}\tau +{K}_{\mathrm{d}}\frac{\mathrm{d}{e}\left(t\right)}{\mathrm{d}t} , $$ (1) 其中:e(t) 为t 时刻测量值和设定值之间的误差。公式中三个参数Kp、Ki、Kd 的大小决定了PID 控制器的性能。公式中右边第一项为比例控制项,比例项没有延迟,只对当前的误差起作用。公式中右边第二项为积分控制项,它对历次误差的累加值起作用,具有滞后特性。公式中右边第三项为微分控制项,它与误差的微分成正比。误差的微分反映了误差变化的速率和误差变化的趋势。这种“超前”预测误差的能力可以抵消积分控制项里滞后因素的影响。适当的微分控制作用可以增加束流强度控制的稳定性。
-
常规PID参数整定方法有Ziegler-Nicholes方法[5-6]、Cohen-Coon方法[7]、内部模型控制方法(Internal Model Control, IMC)[8] 等,本文使用遗传算法(Genetic Algorithm, GA)来整定PID参数。在遗传算法中,解决方案的集合被称为种群,每个解决方案被称为个体,每个解决方案的数据需要编码成遗传空间的基因型数据结构,解决方案效果的评价指标被称为适应度值。利用遗传算法进行PID参数整定的流程如图1所示,其过程可以描述为下列几步。

图 1 遗传算法流程
步骤一:Kp、Ki、Kd参数的编码。PID 参数Kp、Ki、Kd的每一个值都编码为一串长度为N的二进制码,二进制码的长度N直接影响计算结果的精度和遗传算法的计算效率。
步骤二:种群初始化。对于每一个长度为N的二进制码,最前面的M个码是最高有效位(Most Significant Bit, MSB),这M个码共有2M种可能值。因此,我们选择2M串二进制码的集合作为种群,即把M个最高有效位的2M种可能值都考虑进来。种群初始化时,每一串码的最前面M个码是固定的,后面的(N-M)个码随机抽样产生。
步骤三:适应度评估。在PID参数的整定过程中,选取下列适应度值J 为评价指标[9]:
$$ J={\int }_{0}^{\mathrm{\infty }}t\left|e\left(t\right)\right|\mathrm{d}t \text{,} $$ (2) 其中:|e(t)|为t时刻的误差绝对值。当J小于设定值J0时,就输出最佳PID参数Kp、Ki、Kd值;否则,就利用遗传算法产生新的Kp、Ki、Kd种群。
步骤四:遗传算法操作。遗传算法包括选择、交叉和变异三项操作:选择是为了从当前种群中选出优良的个体作为父代繁殖下一代;交叉是将两个个体从各自二进制码的某一位置开始互相交换;变异则是对选中的个体以一定的概率随机地改变某个二进制码的值。
需要强调的是,这里对遗传算法初始化的实施。考虑到 PID 参数的特性,在种群初始化的时候,充分考虑了每串二进制码最高有效位的初始化。因此,大大地加快了寻找最佳PID参数值的速度。
-
图2显示了束流强度PID控制的仿真计算框图,仿真计算的输入量是束流强度的设定值,输出量是束流强度的计算值或者测量值。首先利用遗传算法找到PID控制器的三个控制参数Kp、Ki、Kd;然后,PID控制器按照式(1)计算出可调光阑中圆柱体需要转动的角度值u。图2中的“光阑旋转角度”方框完成角度的旋转,在仿真计算中光阑角度的旋转速度是固定的,例如:10°/s;光阑完成角度旋转以后,计算束流强度值。假使离子源出来的束流光斑呈高斯分布,束流强度探测器布局在低能传输段,测量值反映的是束流经过光阑以后的束流强度值。测量值再反馈回去和设定值进行比较,进行下一时刻的 PID控制。
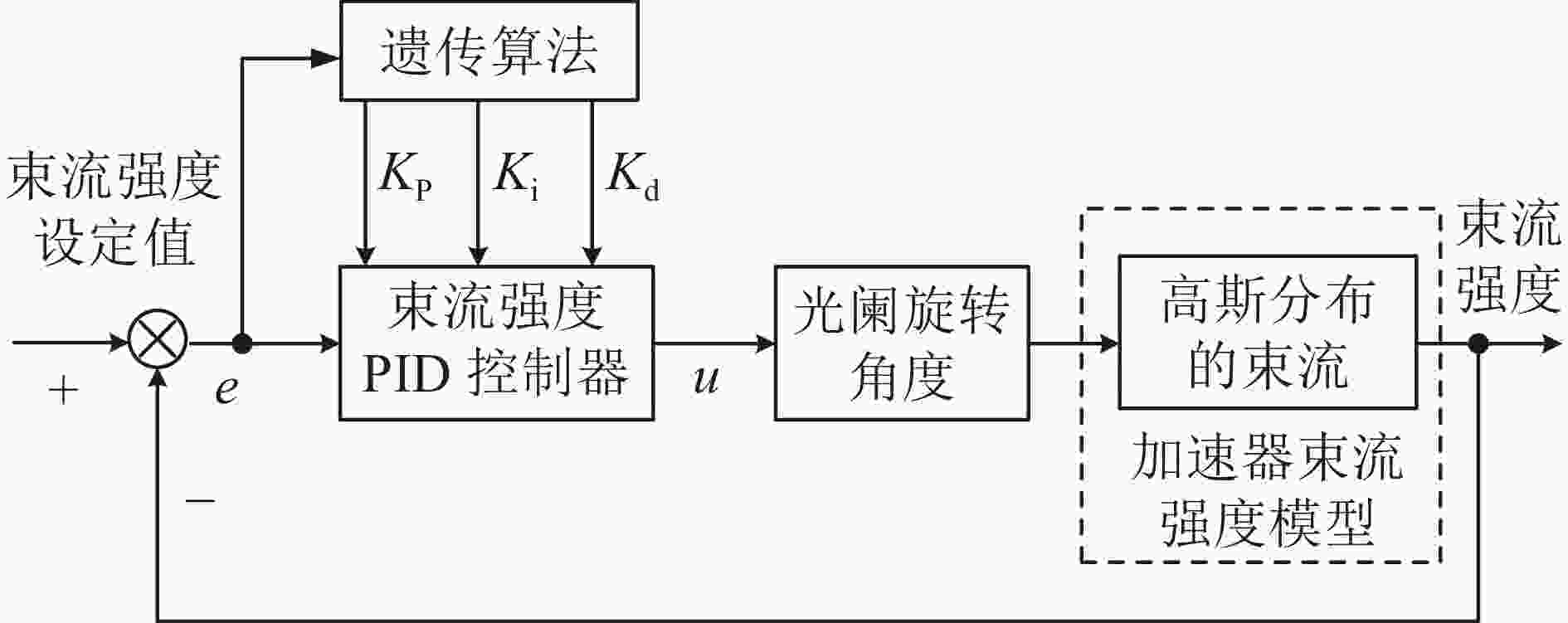
图 2 束流强度 PID 控制仿真模型
-
假设加速器束流处于如下稳定状态:束流半高宽度(Full Width Half Maximum, FWHM)为12 mm,束流强度为1 mA,光阑旋转角处于57°。在t = 0时刻,束流半高宽度分别减少到了8, 9, 10, 11 mm,导致束流强度发生了变化。通过PID控制调整光阑角度,让束流强度回到1 mA。
图3显示了在PID自动控制过程中光阑角度随时间变化的规律。其中,光阑角度转速固定为10°/s。在t=0时刻,光阑角度处于57°。当束流FWHM分别为8, 9, 10和11 mm时,为了让束流强度回到1 mA,光阑角度分别需要旋转至38.0°, 42.8°, 47.5°和 52.3°,光阑角度旋转需要的时间随FWHM增大而减少。图4显示了在PID自动控制过程中束流强度随时间变化的规律。当t=0时,光阑角度处于57°时,束流FWHM为8, 9, 10和11 mm时的束流强度分别为1.58, 1.42, 1.26和1.12 mA。通过PID控制调整光阑角度,分别用了1.90, 1.42, 0.95和0.47 s让束流强度回到1 mA。

图 3 随时间变化的光阑角度

图 4 随时间变化的束流强度
-
当束流中心偏离光阑中心的时候,束流强度会发生变化。图5显示了当束流中心偏离光阑中心2, 3, 4 和5 mm时束流强度随着光阑角度变化的规律,其中,束流FWHM保持在10 mm不变。图中显示当光阑角度处于180°(即光阑孔径全部放开至最大值)时,即使束流中心偏离了光阑中心,束流强度也不会变化。可是,当光阑孔径处于半放开状态时,束流中心偏离光阑中心将导致束流强度变小。如图中的垂直线所示,光阑圆柱体处于47.5°不变,当束流中心偏离光阑中心3, 4, 5 mm时,束流强度从1 mA分别下降到0.84, 0.73, 0.62 mA。
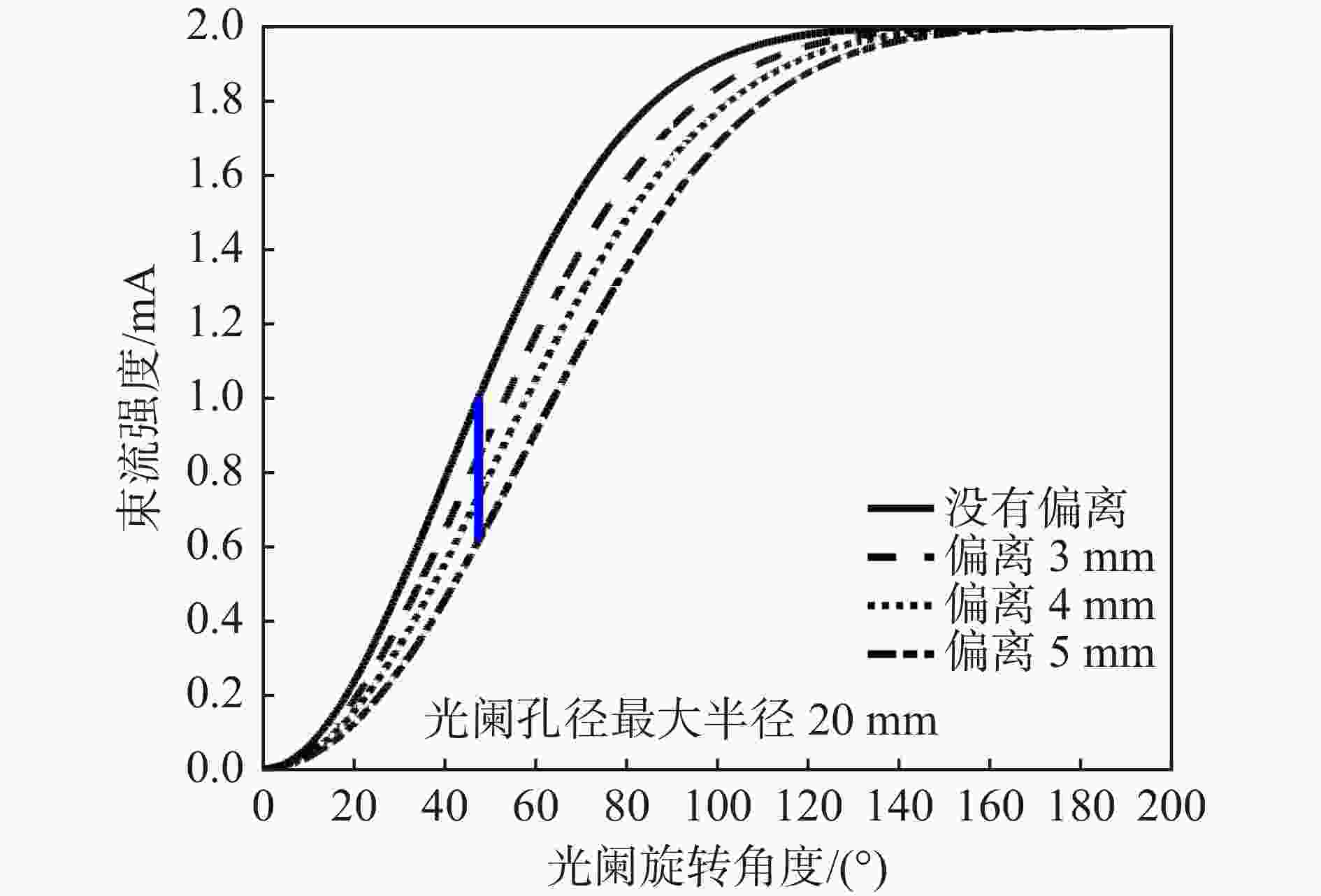
图 5 束流强度与光阑旋转角度的关系(在线彩图)
利用PID自动控制方法,通过自动调整光阑角度,能让束流强度回到1 mA。图6显示了在PID自动控制过程中束流强度随时间变化的规律,其中,束流FWHM保持在10 mm,光阑旋转速度为10°/s。当束流中心偏离光阑中心2, 3, 4 和5 mm时,通过PID控制调整光阑角度,分别用了0.27, 0.6, 1.07 和 1.65 s让束流强度回到1 mA。
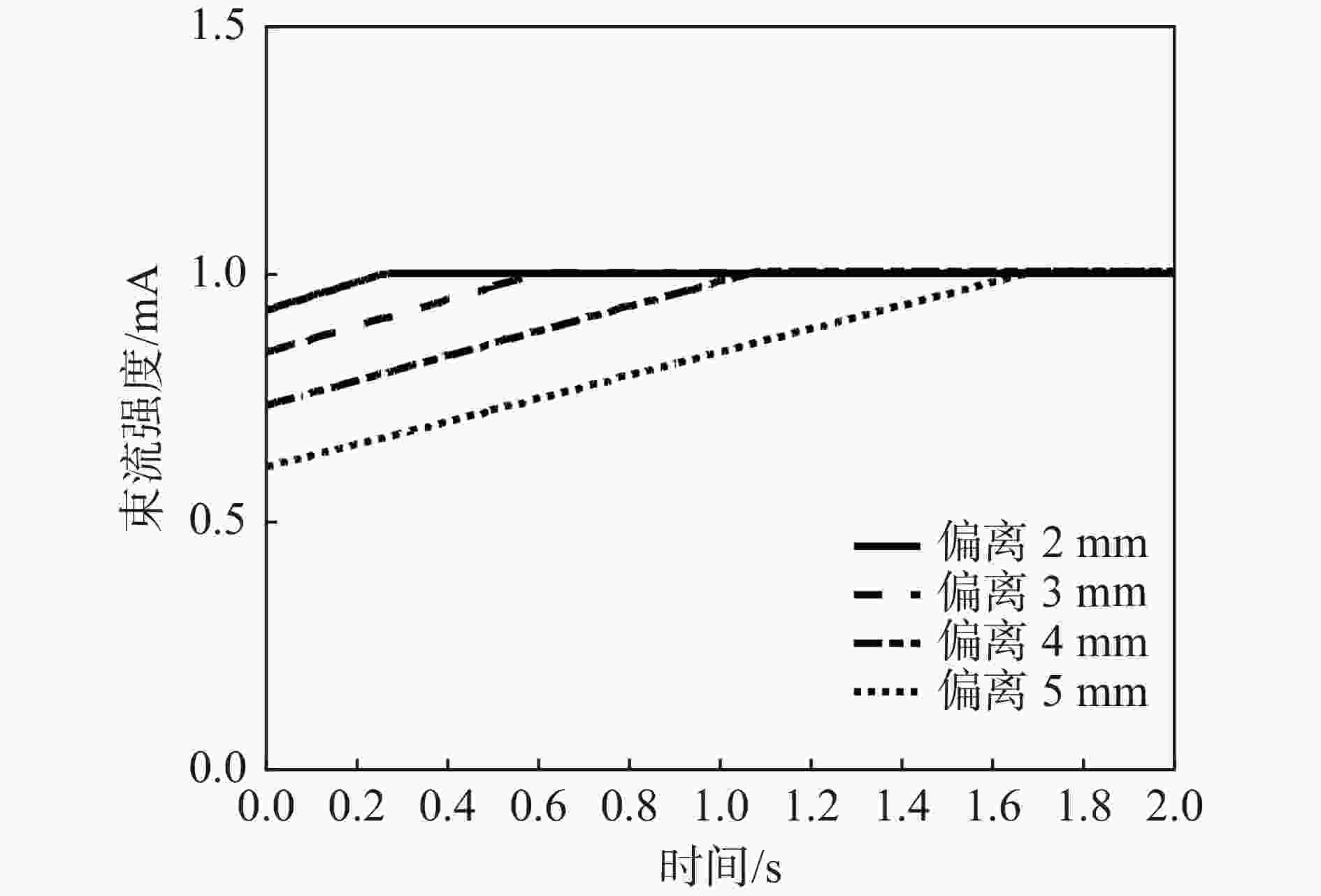
图 6 随时间变化的束流强度
-
可调光阑已经用在ADS加速器样机上调节束流强度[10],该加速器样机使用的控制系统为基于EPICS (Experimental Physics and Industrial Control System) 软件的加速器控制系统。 为了满足CiADS 耦合控制的需求,本工作需要在高可靠性的分布式控制系统(Distributed Control System, DCS)中实现用可调光阑调节束流强度的功能,该DCS系统将用于反应堆的控制。本文与文献[11] 使用的是同一套DCS控制系统, 由北京广利核公司生产,该公司的产品已经用在我国多个核电站反应堆控制里。我们使用的这套DCS控制系统包括操作站、控制站、通讯网络和服务器等,DCS控制系统通过控制站里的网关与第三方产品 (例如:本文的可调光阑及其电机) 通讯。
图7显示了束流强度调节功能在DCS系统上实施的控制框图。左下角显示了测量束流强度的三种探测器:直流变压器(DCCT)、交流变压器(ACCT)和法拉第筒(FC),束流强度探测信号经过网关1进入DCS系统控制站。然后,控制站的控制器进行束流强度调节所需的信号处理、控制算法和逻辑分析等。PID控制器通过比较束流强度设定值I0和测量值I,根据比例系数Kp、积分系数Ki 和微分系数Kd三个参数来产生控制动作U2。其中,U2为自动调节光阑需要转动的角度。DCS系统中还设定了手动调节功能,当操作员在操作站里按动手动调节键时,光阑转动角度U为手动设定值U1。最后,光阑转动角度U通过控制站里的网关输出给外部的光阑驱动系统。

图 7 DCS系统实现束流强度调节的控制框图 (在线彩图)
图8显示了DCS系统实现束流强度控制的测试图,图的左侧为DCS控制系统的机柜,是垂直放置在地面上的;图8的右侧为可调光阑、电机及其控制器等,它们水平放置在桌面上,都是由倍福公司生产。DCS系统里的网关通过网线连接到倍福控制器CX2020。倍福控制器再连接至倍福驱动器AX5203及其伺服电机AM8032。

图 8 DCS系统实现束流强度控制的测试图(在线彩图)
在完成DCS系统和一整套倍福的运动控制系统联调后,利用手动调节进行了光阑转角的精度测试。如图7中的控制框图所示,手动设定光阑角度值N0,比较光阑目前的角度值N。如果两者不一样,DCS系统通过网关2将角度调节值送给电机驱动器和控制器,同时,电机驱动器和控制器又将新的角度测量值N通过网关2送回到DCS系统并显示在操作站。角度测量中对正向转动和反向转动的各种实例进行了测试,例如:第一次从0°正向转到180°,再反向转回到0°。第二次则从0°正向转到90°,再反向转回到0°;然后,从90°正向转到180°,再反向转回到90°;以此类推。表1列出了光阑角度定位偏差测量值,测量结果表明光阑转角精度0.002°。在测量中观察到:光阑转角精度只与光阑角度设定值有关,而且,每一次测量的结果都一样。光阑转角精度只与光阑的制作工艺有关,与DCS系统的数据传输及其测量方法无关。
表 1 光阑角度定位偏差
正向定位测试 反向定位测试 光阑角度设定
定位点/(°)光阑角度测试
定位点/(°)光阑角度定位
平均偏差/(°)光阑角度设定
定位点/(°)光阑角度测试
定位点/(°)光阑角度定位
平均偏差/(°)0 0.000 00 0.000 00 195 195.000 00 0.000 00 15 14.999 60 0.000 40 180 179.999 78 0.000 22 30 30.000 40 −0.000 40 165 165.002 60 −0.002 60 45 45.000 00 0.000 00 150 150.001 14 −0.001 14 60 59.999 60 0.000 40 135 135.000 88 −0.000 88 75 74.998 40 0.001 60 120 120.001 50 −0.001 50 90 90.016 72 −0.016 72 105 105.001 36 −0.001 36 105 105.000 90 −0.000 90 90 89.999 78 0.000 22 120 119.999 50 0.000 50 75 75.000 40 −0.000 40 135 134.998 02 0.001 98 60 59.999 38 0.000 62 150 149.998 06 0.001 94 45 45.001 32 −0.001 32 165 164.999 30 0.000 70 30 30.000 16 −0.000 16 180 180.000 66 −0.000 66 15 14.999 82 0.000 18 195 194.998 06 0.001 94 0 0.000 00 0.000 00 第2节中图5显示了束流FWHM为10 mm时,束流强度与光阑角度的对应关系,根据测量结果得到了束流强度的调节精度。当最大束流强度为2 mA时,光阑角度设定值分别为0°, 15°, 30°, 45°, 60°, 75°, 90°时,正向转动的精度为0, 0.01, 0.01, 0, 0.012 5, 0.02, 0.1 μA;反向转动的精度为0, 0.004 5, 0.004, 0.033, 0.019 4, 0.005, 0.001 4 μA。因此,正向反向转动光阑角度,束流强度的调节偏差小于0.1 μA。调节束流强度的精度达到0.000 05 A,例如:当束流强度为1 mA时,束流强度的调节偏差小于0.05 μA。该束流强度调节精度足够满足CiADS装置的需要。从图5可见,光阑角度超过90°时,束流强度变化很小。即使光阑角度调节有微小的偏差,束流强度调节也是非常准确的。
-
本文研究了CiADS加速器束流强度的PID自动控制方法,以及束流强度控制系统在DCS系统上的实现。首先,设计了优化的遗传算法来提取PID控制器的参数,优化的遗传算法充分考虑了每串二进制码最高有效位的初始化,大大地加快了寻找最佳 PID 参数值的速度。并且,参照加速器低能传输段质子束高斯分布特征建立了束流强度模型,并仿真验证了遗传算法得到PID 控制参数的可靠性。仿真计算结果表明束流半高宽的变化或者束流中心的偏离均会导致束流强度的变化。利用遗传算法得到的PID控制参数可以精确地控制束流强度至设定值并保持稳定。然后,在高可靠性的DCS系统上实现了束流强度的自动和手动控制功能,为CiADS耦合控制系统中实现束流强度的控制奠定了基础。在自动控制功能里,束流强度测量值送入DCS系统并与设定值比较,通过PID控制器计算出新的光阑孔径值,并用来调节束流强度。此外,操作员还可通过手动设定光阑孔径值来改变加速器束流强度。最后,利用DCS系统手动调节功能测试了光阑转角的精度,测量结果表明,光阑转角调节的精度只与光阑的制作工艺有关,与DCS系统的数据传输及其测量方法无关。无论是正向转动还是反向转动,测量的光阑转角偏差均小于0.002°,束流强度的调节精度达到0.000 05 A。
Study of Beam Intensity Control for CiADS Facility Based on Genetic PID Algorithm and Its Implementation in DCS Control System
-
摘要: 在加速器驱动次临界系统里,束流强度的自动控制非常重要。本工作研究了加速器驱动嬗变研究装置(CiADS)束流强度的比例-积分-微分(PID)自动控制技术及其实现。 设计了优化的遗传算法来提取PID控制器的参数,优化的遗传算法将PID控制参数用一串二进制码表示。在种群初始化时,充分考虑了每串二进制码最高有效位的初始化,大大地加快了寻找最佳PID参数值的速度。参照加速器低能传输段质子束高斯分布特征建立了束流强度模型,并仿真验证了遗传算法得到PID控制参数的可靠性。仿真计算结果表明,束流半高宽的变化或者束流中心的偏离均会导致束流强度的变化。利用遗传算法得到的PID控制参数可以精确地控制束流强度至设定值并保持稳定。然后,在分布式控制系统(DCS)中实现了束流强度的自动和手动控制功能。在自动控制功能里,束流强度测量值送入DCS系统并与设定值比较,通过PID控制器计算出新的光阑孔径值和光阑旋转角,并用来调节束流强度。最后,利用DCS系统手动调节功能测试了光阑转角的精度。测量结果表明,光阑转角偏差小于0.002°,束流强度的调节精度达到0.000 05 A。
-
关键词:
- 加速器驱动次临界系统 /
- 束流强度 /
- 比例-积分-微分控制 /
- 分布式控制系统.
Abstract: In an accelerator driven sub-critical system(ADS), it is very important to automatically control the beam intensity of the accelerator. The method for controlling the beam intensity with a proportion-integral-differential(PID) controller has been studied for the China initiative Accelerator Driven System(CiADS) facility. Firstly, in order to quickly find the global optimal parameters of the PID controller, Genetic Algorithm is used for determining the parameters of the PID controller, where the method for initializing the population in the algorithm has been improved. Secondly, a model of beam intensity is built by considering the proton beam with a Gaussian distribution of a given FWHM(Full Width at Half Maximum) at the Low Energy Beam Transport(LEBT) line of the accelerator, in order to evaluate the proposed control method with the extracted PID parameters. The simulations based on the model of beam intensity have indicated that the beam intensity varies with either the different value of FWHM or the different position of beam center. Thirdly, both the automatic and manual control functions for the beam intensity have been implemented in a distributed control system(DCS) system. In the automatic control function, the measured value of the beam intensity is sent to the DCS system and is compared with the setting value. Then, the new values of the aperture size and the rotation angle of the aperture are calculated with the PID controller and are used to adjust the beam intensity. Finally, the accuracy of the rotation angle of the aperture is measured by using the manual function in the DCS system. The measurement results show that the deviation of the angle adjustment of the aperture is less than 0.002 degree, and the adjustment accuracy of the beam intensity is 0.000 05 A. -
表 1 光阑角度定位偏差
正向定位测试 反向定位测试 光阑角度设定
定位点/(°)光阑角度测试
定位点/(°)光阑角度定位
平均偏差/(°)光阑角度设定
定位点/(°)光阑角度测试
定位点/(°)光阑角度定位
平均偏差/(°)0 0.000 00 0.000 00 195 195.000 00 0.000 00 15 14.999 60 0.000 40 180 179.999 78 0.000 22 30 30.000 40 −0.000 40 165 165.002 60 −0.002 60 45 45.000 00 0.000 00 150 150.001 14 −0.001 14 60 59.999 60 0.000 40 135 135.000 88 −0.000 88 75 74.998 40 0.001 60 120 120.001 50 −0.001 50 90 90.016 72 −0.016 72 105 105.001 36 −0.001 36 105 105.000 90 −0.000 90 90 89.999 78 0.000 22 120 119.999 50 0.000 50 75 75.000 40 −0.000 40 135 134.998 02 0.001 98 60 59.999 38 0.000 62 150 149.998 06 0.001 94 45 45.001 32 −0.001 32 165 164.999 30 0.000 70 30 30.000 16 −0.000 16 180 180.000 66 −0.000 66 15 14.999 82 0.000 18 195 194.998 06 0.001 94 0 0.000 00 0.000 00  下载: 导出CSV
下载: 导出CSV
-
[1] 詹文龙, 徐瑚珊. 中国科学院院刊, 2012, 27(3): 375. doi: 10.3969/j.issn.1000-3045.2012.03.017 ZHAN Wenlong, XU Hushan. Bulletin of the Chinese Academy of Sciences, 2012, 27(3): 375. (in Chinese) doi: 10.3969/j.issn.1000-3045.2012.03.017 [2] ABDERRAHIM H A, BRUYN D D, EYNDE G, et al. Encyclopedia of Nuclear Energy,, 2021, 4: 191. doi: 10.1016/B978-0-12-819725-7.00093-3 [3] 徐瑚珊, 何源, 潘卫民, 等. 加速器驱动嬗变研究装置可行性研究报告[R]. 兰州: 中国科学院近代物理研究所, 2017. XU Hushan, HE Yuan, PAN Weimin, et al. Feasibility Study Report of the China Initiative Accelerator Driven System[R]. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2017. (in Chinese) [4] NIU Haihua, LI Youtang, HE Yuan, et al. High Power Laser and Particle Beams, 2020, 32(5): 054004. doi: 10.11884/HPLPB202032.190393 [5] SHAMSUZZOHA M, SKOGESTAD S. Journal of Process Control, 2010, 20(10): 1220. doi: 10.1016/j.jprocont.2010.08.003 [6] ISDARYANI F, FERIYONIKA F, FERDIANSYAH R. Journal of Physics: Conference Series, 2020, 1450(1): 012033. doi: 10.1088/1742-6596/1450/1/012033 [7] GAMASU R, JASTI V R B. International Journal of Control and Automation, 2014, 7(1): 357. doi: 10.14257/ijca.2014.7.1.32 [8] GANI M M, ISLAM M S, ULLAH M A. SN Applied ences, 2019, 1(8): 880. doi: 10.1007/s42452-019-0929-y [9] HUI Tianyu, ZENG Wenjie, YU Tao. Nuclear Engineering and Design, 2020, 370: 110835. doi: 10.1016/j.nucengdes.2020.110835 [10] LIU Shuhui, WANG Zhijun, JIA Huan, et al. Nucl Instr and Meth A, 2017, 843: 11. doi: 10.1016/j.nima.2016.10.055 [11] 尹凯, 马雯静, 崔文娟, 等. 原子核物理评论, 2022, 39(1): 121. doi: 10.11804/NuclPhysRev.39.2021064 YIN Kai, MA Wenjing, CUI Wenjuan, et al. Nuclear Physics Review, 2022, 39(1): 121. (in Chinese) doi: 10.11804/NuclPhysRev.39.2021064 -

 点击查看大图
点击查看大图

图(8) / 表 (1)
计量
- 文章访问数: 185
- HTML全文浏览量: 63
- PDF下载量: 6
- 被引次数: 0


 甘公网安备 62010202000723号
甘公网安备 62010202000723号