


-
加速器驱动次临界系统(ADS)是国际公认处理核废料的有效手段[1]。为了顺利完成对超导直线加速器的相关技术验证,中国科学院近代物理研究所和高能物理研究所联合研制了ADS质子超导直线加速器样机CAFe(Chinese ADS Front-end Demo Linac)来进行技术验证[2]。在CAFe超导加速段中为了保证超导设备的稳定运行,需要提前对超导腔的加速梯度和品质因素进行测量[2]。随着调束流强的不断提高,对超导腔的要求越来越高,超导腔在2K的低温环境下会有更好的品质[3],原有的4K低温系统已经无法满足现有的工程需求,因此,对原有的低温系统的升级改造十分必要。在2K低温系统下,原来的液氦状态将变成超流氦的状态,同时还要增加更多的泵组和传感器等其他设备,管路的设计也会更复杂[4],原有的控制系统已不能满足需求。本文针对新设计的2K低温控制系统一些关键技术问题的研究进行介绍,为了适应更复杂的低温控制流程,采用Sequencer软件来实现更多的顺序控制流程,同时为了实现自适应杜瓦内压强的稳定控制,利用PLC(Programmable Logic Controller)来建立模糊比例积分微分(Proportion Integral Differential, PID)控制算法对压强进行控制,从而为实现2K超导低温控制系统中的流程控制和自适应的压强控制提供借鉴和参考。
-
2K超导低温控制系统为超导腔与低温系统的前期验证工作提供了技术支撑,对于该低温垂测控制系统来说主要的要求是保持温度和压力的恒定。如何保证温度和压力稳定在安全的范围内,使得垂测过程顺利进行,这需要控制系统对2K低温系统中的被控对象,如:泵组、管路中的阀门、加热器等设备进行有序的控制。该控制过程是需要有先后顺序的,其中主要流程包括:置换气体、降温到2K、稳定运行为腔体垂测提供条件、实验结束回温回收气体等。顺序控制的过程比较多,这要求控制系统能够灵活有序地切换到不同的流程,同时还需要有可视化的操作界面,方便工作人员操作。为解决该问题,方便程序的实现和调试工作,便采用Sequencer来实现该功能。Sequencer中使用的是状态符号语言(State Notation Language, SNL)编程,程序语法简单,而且Sequencer是EPICS (Experimental Physical and Industrial Control System)中的集成包,兼容性较好,对于需要监控的关键进程变量(Process Variable, PV),可以利用EPICS IOC(Input/Output Controller)发布到网络中,通过上层界面实现可视化。
对于杜瓦内腔压的控制,可以采用PID控制算法,但对于包含具有大惯性被控设备的系统来说,由于系统内突然的扰动,依靠原有已设定的PID参数调节效果不理想。为解决该问题,可以采用具有自适应的模糊PID控制算法来实现对腔压的控制,该算法可以根据压强的变化自动调节PID参数,稳定性更好。
-
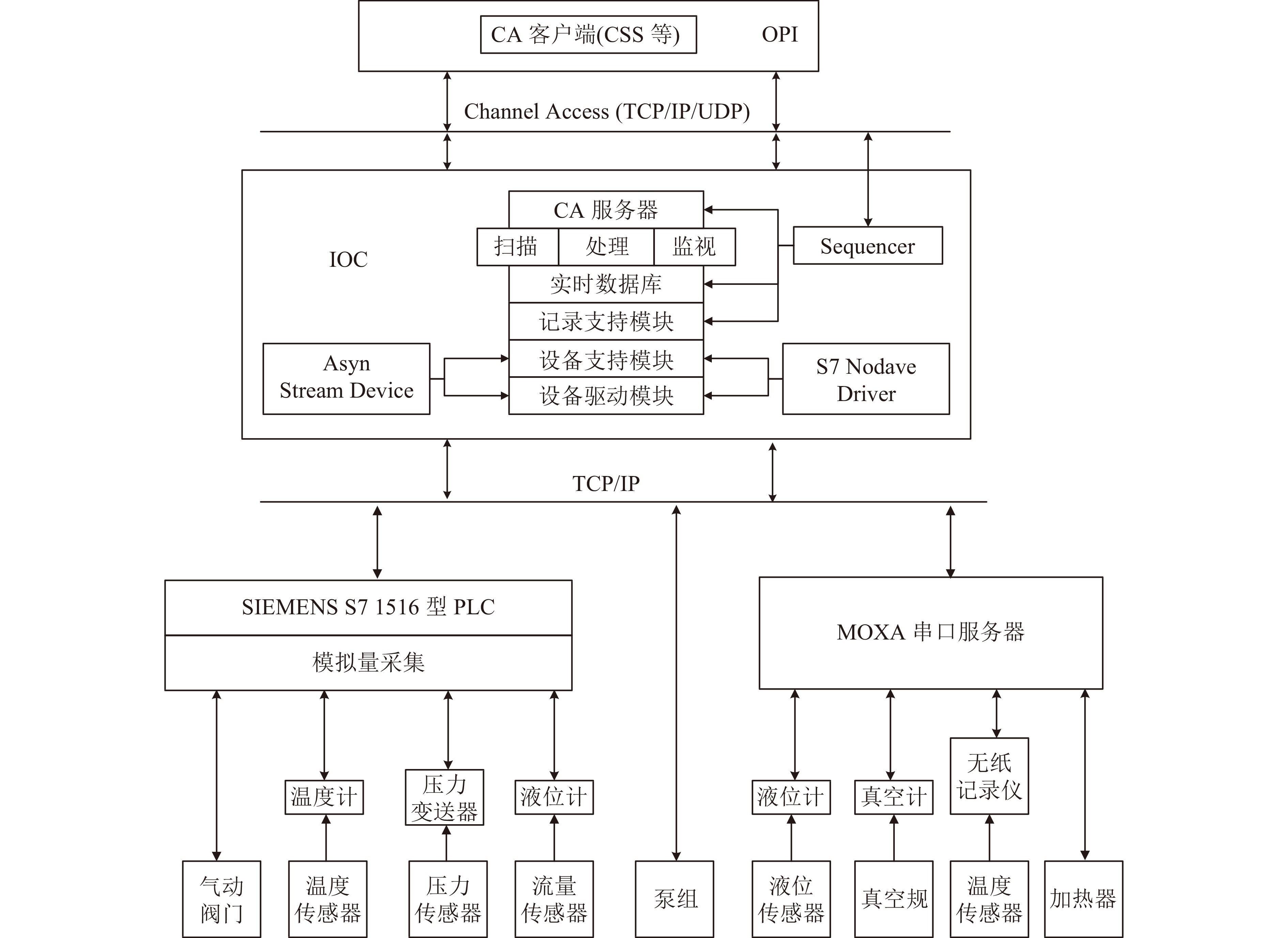
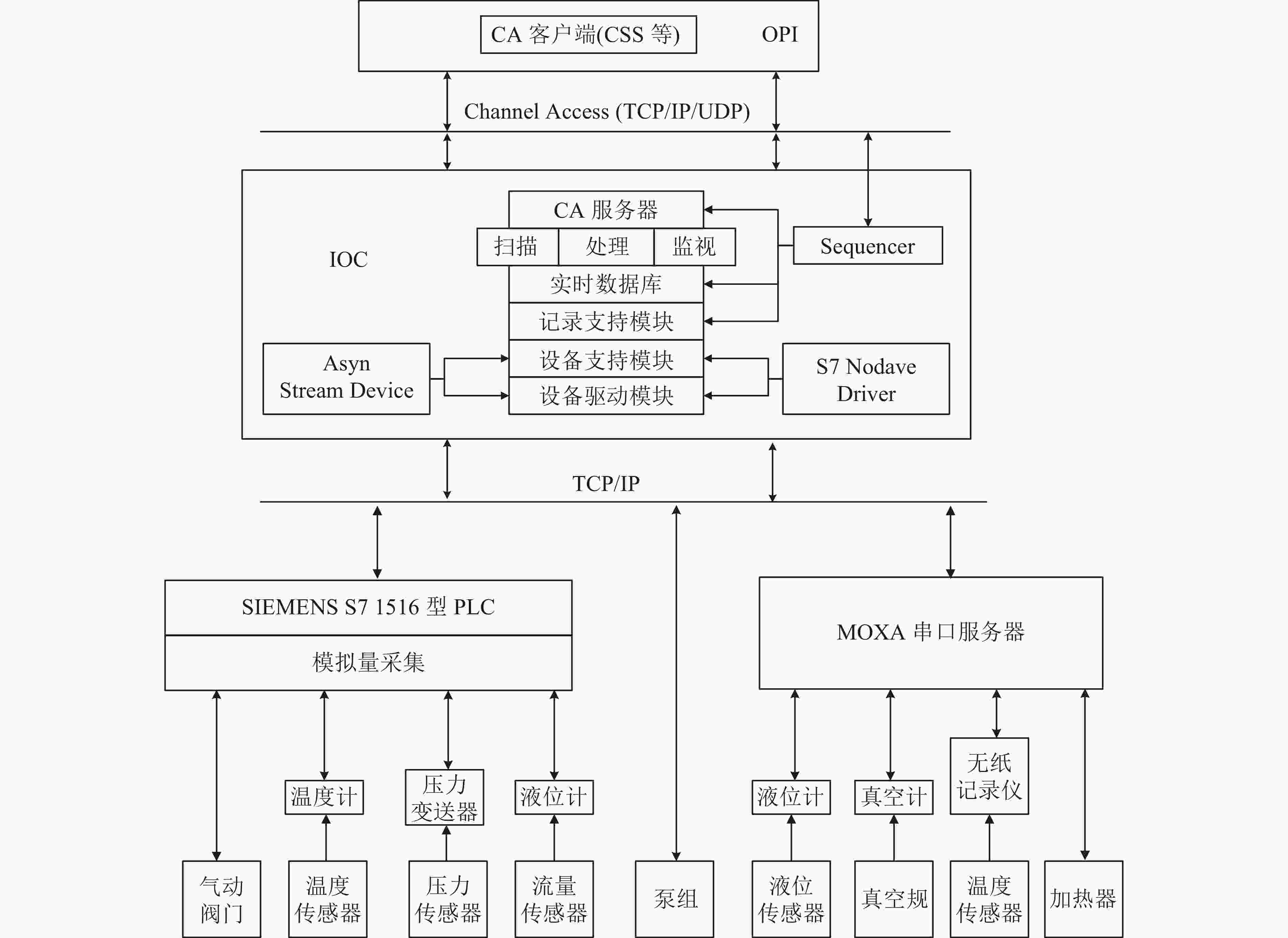
2K超导低温控制系统采用的是EPICS控制系统架构,主要包括三层:前端控制层、IOC层和数据呈现层。对于前端控制层,其主要的硬件控制设备是西门子1500系列 PLC。该类型PLC主要实现了4~20 mA接口类型和支持Profibus协议的底层设备的控制,如:FUJI富士温控器PXF、Leybold真空计GRAPHIX TWO、液位计、气动阀门、压力变送器等。通过串口服务器将被控设备的控制信号接入系统,通过TCP/IP将信号接入到控制网络中。
在IOC层中通过EPICS系统中的各种工具来实现控制系统功能,StreamDevice对液位计和真空计等设备发布和读取PV量,实现对支持RS232、RS485、GPIB等协议设备的远程控制。EPICS系统中的S7 Nodave支持库与IOC进行通信,同时将PV量发布到控制网络中。Sequencer实现对被控对象的具体时序逻辑控制。
在数据呈现层中使用通道访问(Channel Access, CA)协议将实际的I/O发布给客户端,控制界面主要采用的是CSS(Control System Studio)等软件监视和操作大型控制系统,着眼于可视化控制,并可以随时查看存档数据和实时数据,实现了上层软件对底层硬件的控制。图1是具体的控制系统结构图。
-
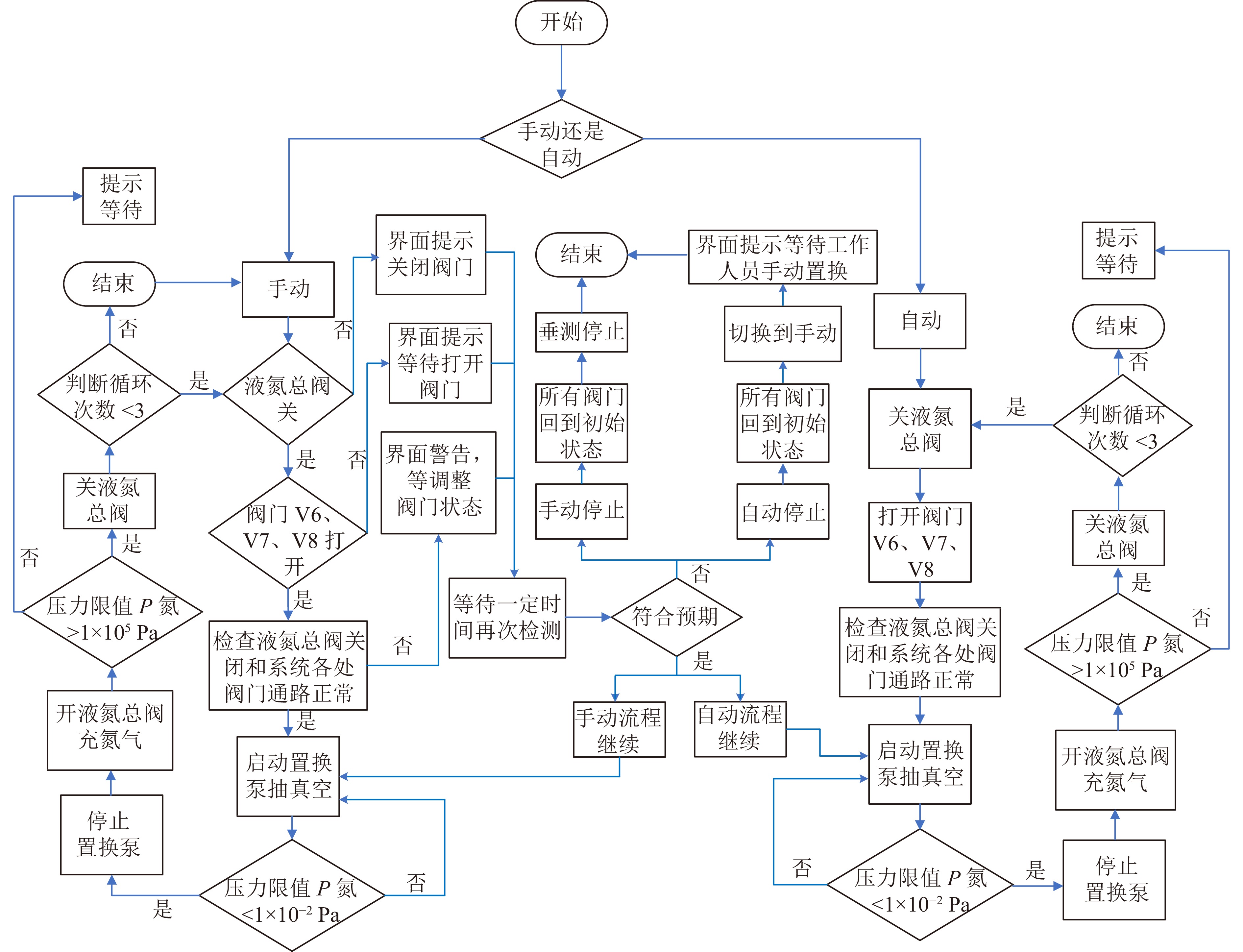
2K控制系统中流程控制主要有分为以下几个部分:液氮的置换、液氦置换、液氮降温、液氦降温、积液、温度维持进行垂测、液氮回温和液氦回温回收等等。在这些流程控制中,需要阀门、泵组等设备依序启停和开闭,并通过各种不同的组合方式来实现不同的控制流程,这要求控制系统在不同的过程中能够灵活切换。以其中液氮置换过程举例说明,如图2所示,其他的控制过程也有类似的过程。
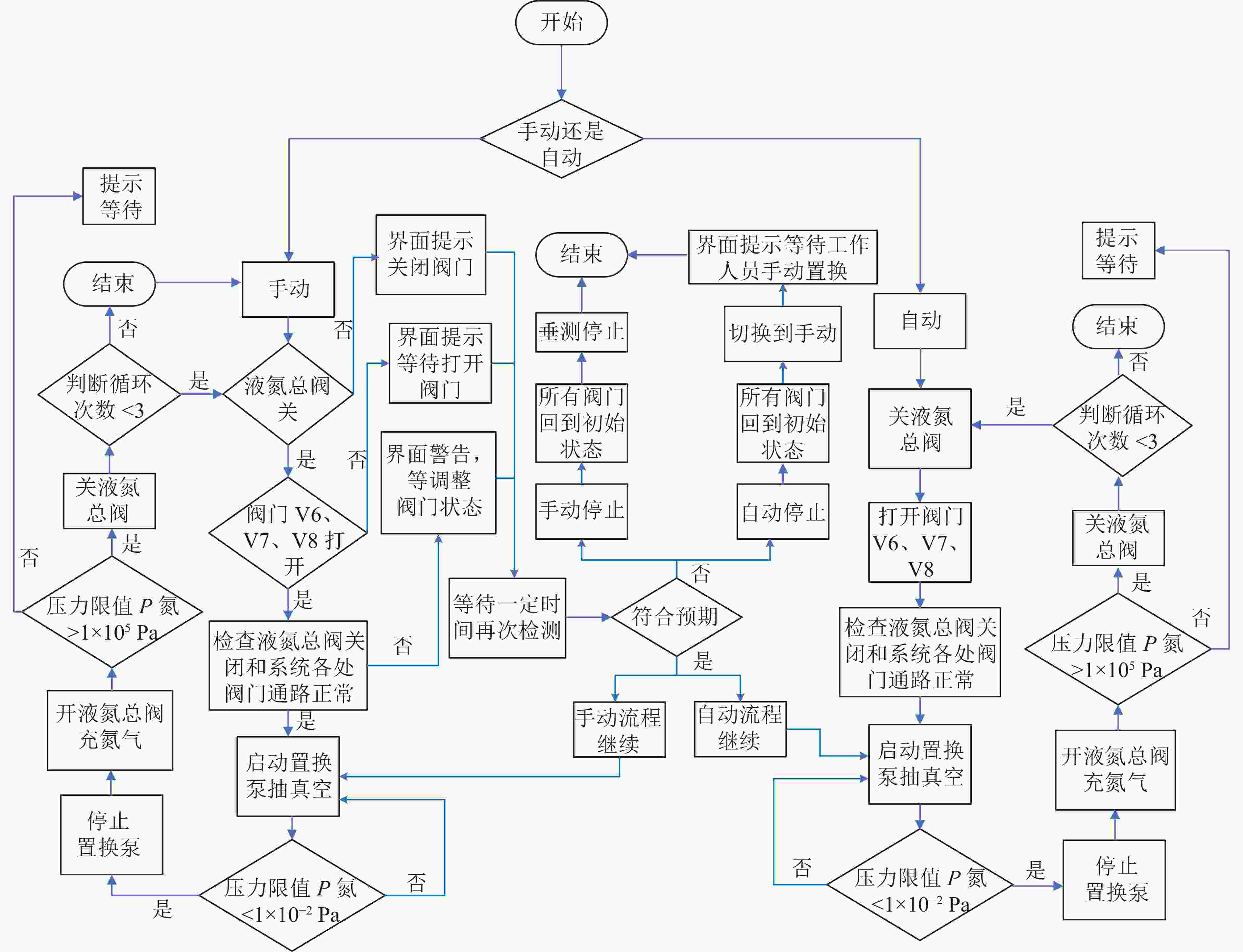
由图2 可以看出2K的控制流程涉及自动和手动两个部分,而且这两个部分都涉及到机器和机器之间交互以及人机之间的交互。在自动状态下一些涉及到设备安全的环节需要有足够充分的异常处理的机制,当遇到信号异常的时候,要求程序立刻做出处理,并让系统尽量恢复原来的状态,同时切换到手动状态,在界面上显示通知运行人员,以这些措施来保证整个系统的稳定和安全。从图2中可以看出,仅对于氮气置换这个过程来说,被控设备如阀门、泵组等的动作,每个步骤都是有一定的先后顺序的,必须按照时序的要求执行,选择一种合适的控制方法十分必要。若使用流行的编程语言如C语言去实现该功能,还需要解决程序与EPICS PV的通信问题。本文采用EPICS中包含的集成开发工具Sequencer来实现该功能。Sequencer使用的是SNL语言,它的大多数语法和语义都直接从C继承,并且做了简化,它可在EPICS支持的所有平台上工作,兼容性很好。Sequencer在国内外的粒子加速器、望远镜和其他大型科学实验装置中也有应用。
-
Sequencer是为了实现状态转移控制有限状态机(Finite State Machine, FSM)模型而开发的,可以在EPICS IOC中运行。为了实现不同状态之间的自由切换,在Sequencer中运行多个SNL程序,不同的SNL程序可以用来执行2K控制流程中不同的过程。同时也可以设置多个PV量作为自动和手动切换的标志、人机交互的接口等,是实现人为监控下的自动运行的理想方法。
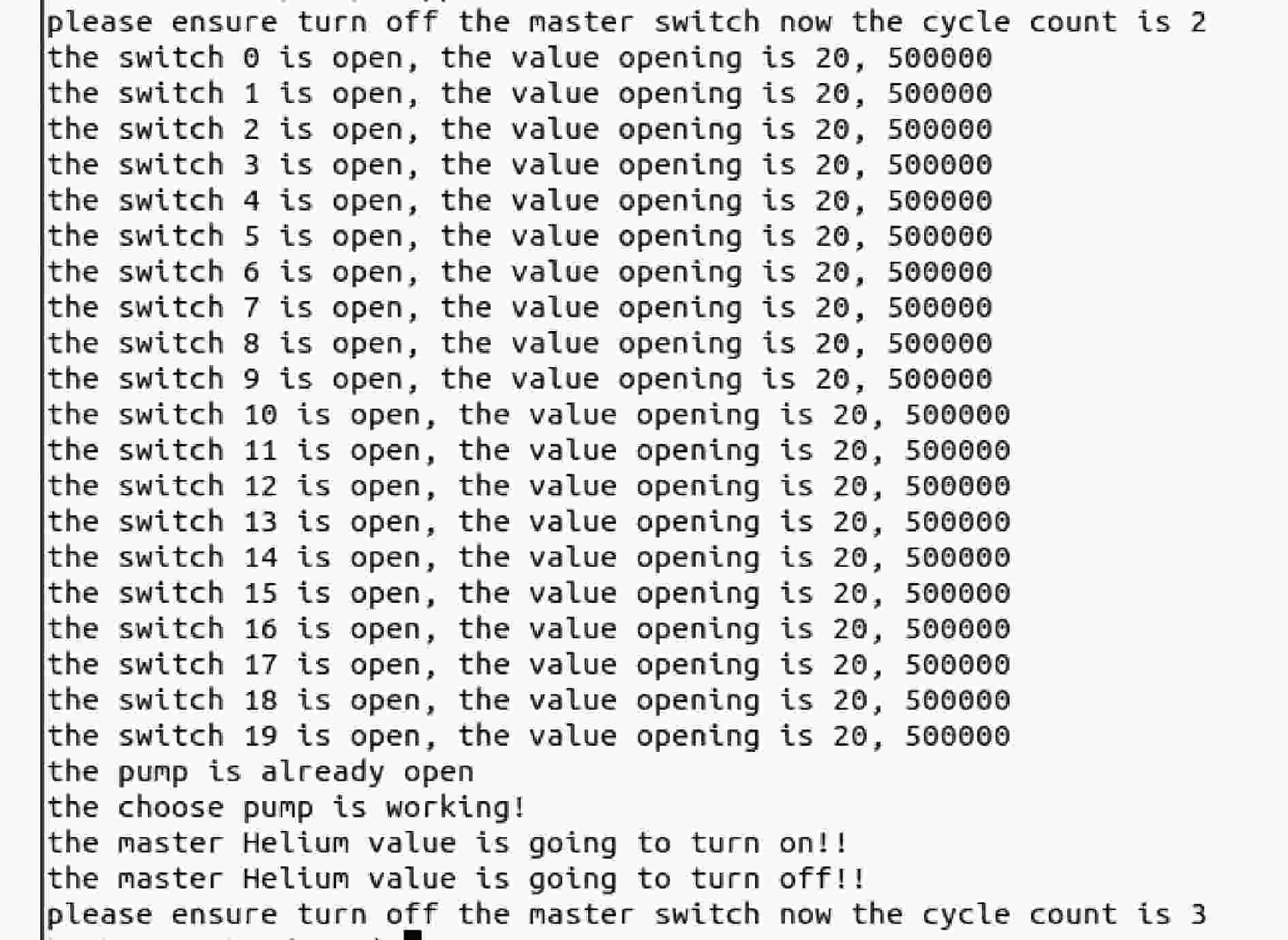
SNL程序中通过状态集来声明不同的状态,不同的状态集在满足一定的条件下会跳转到下一个状态集,在自动的状态下每个过程都将上一个状态集的结束值作为下一个状态的开始,以自动执行所有必须的步骤。SNL语言中允许将程序变量绑定到指定的EPICS PV,而且可以在状态转换条件内使用此类变量,这样可以方便实现有序的自动化的2K所有控制流程。在手动状态下需要人为地给每一个状态赋值初始值以运行每一个过程,Sequencer会定期处理一次PV数据库,并检查、更新和显示所有PV值,只要相关PV的值发生变化,程序变量的值就会不断更新,这样可以满足调试需求,方便了调整调试现场设备。图3显示的是SNL程序实现氮气置换运行输出的结果,该程序是在Linux系统下搭建的EPICS环境中运行的。
-
图4显示是归档数据查询到的2K控制系统控制杜瓦温度到达2K的过程,从PV:cryo-2k:T207-1变化曲线可以看出2K维持阶段的时间长达3 h,期间可进行腔体的垂直测试工作;PV:cryo-2k:normal-flux表示达到2K温度以后补液管路中节流阀前端的温度变化曲线;PV:cryo-2k:L201表示杜瓦内的液位变化,垂测期间要求杜瓦内温度相对保持稳定。
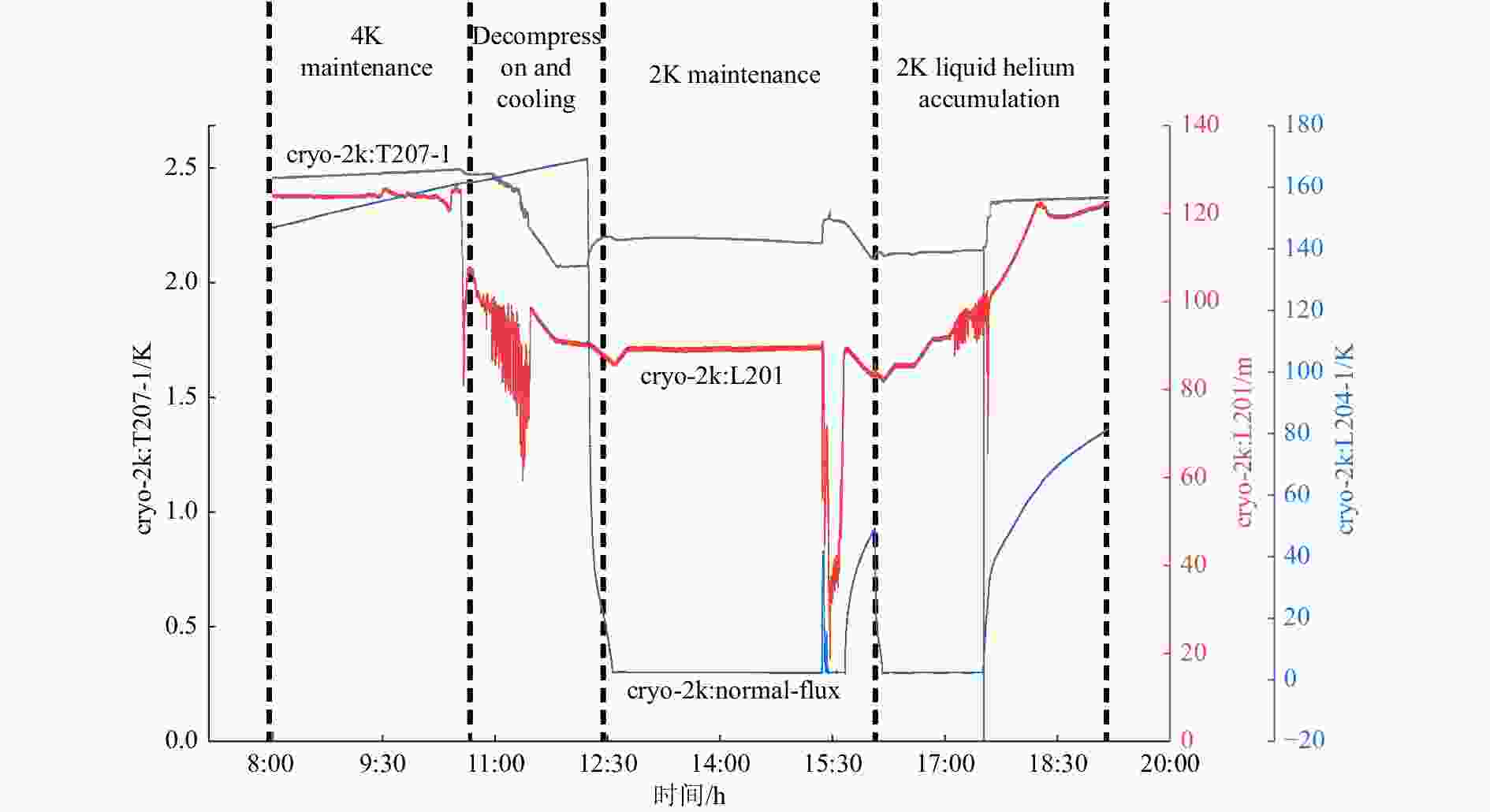
在数据库中调取2K维持阶段的温度数据,该值反映的是垂测杜瓦内的温度,可以得到该温度值均在(2±0.5) K的范围,完全满足垂测温度范围的要求,本文借用数学上的统计指标对采集到的数据进行方差的分析[5],方差的计算公式为
其中:
$ {\sigma }^{2} $ 表示总体方差;$ \sigma $ 表示标准差(均方差);x为样本变量;$ \mu $ 为总体平均值;N为总体例数。从数据库中调取稳定运行时垂测杜瓦内的温度数据进行计算$ {\mu }_{}=2.205 8 $ ,N=34 014(总共有34 014个数据样本),最终的方差为$ {D\left(x\right)}_{}=7.302 79\times {10}^{-5} $ ,从中可以看出温度波动方差非常小,说明系统在控制过程中数据波动很小,使用该方法实现2K系统的过程控制性能较好。 -
在杜瓦回温的过程中要求杜瓦内的压强不能超过安全阈值,这个过程主要是回收氦气。由于回气阀不具有开度控制的功能,只有开和关两种状态,在阀门打开的时候,杜瓦内的压强会快速变化,相当于整个系统加入了比较大的扰动,同时整个2K低温系统也是一个比较大的惯性系统,若使用原有的PID参数调节效果不是很理想,调节时间和超调会更大,具体的如图5所示。
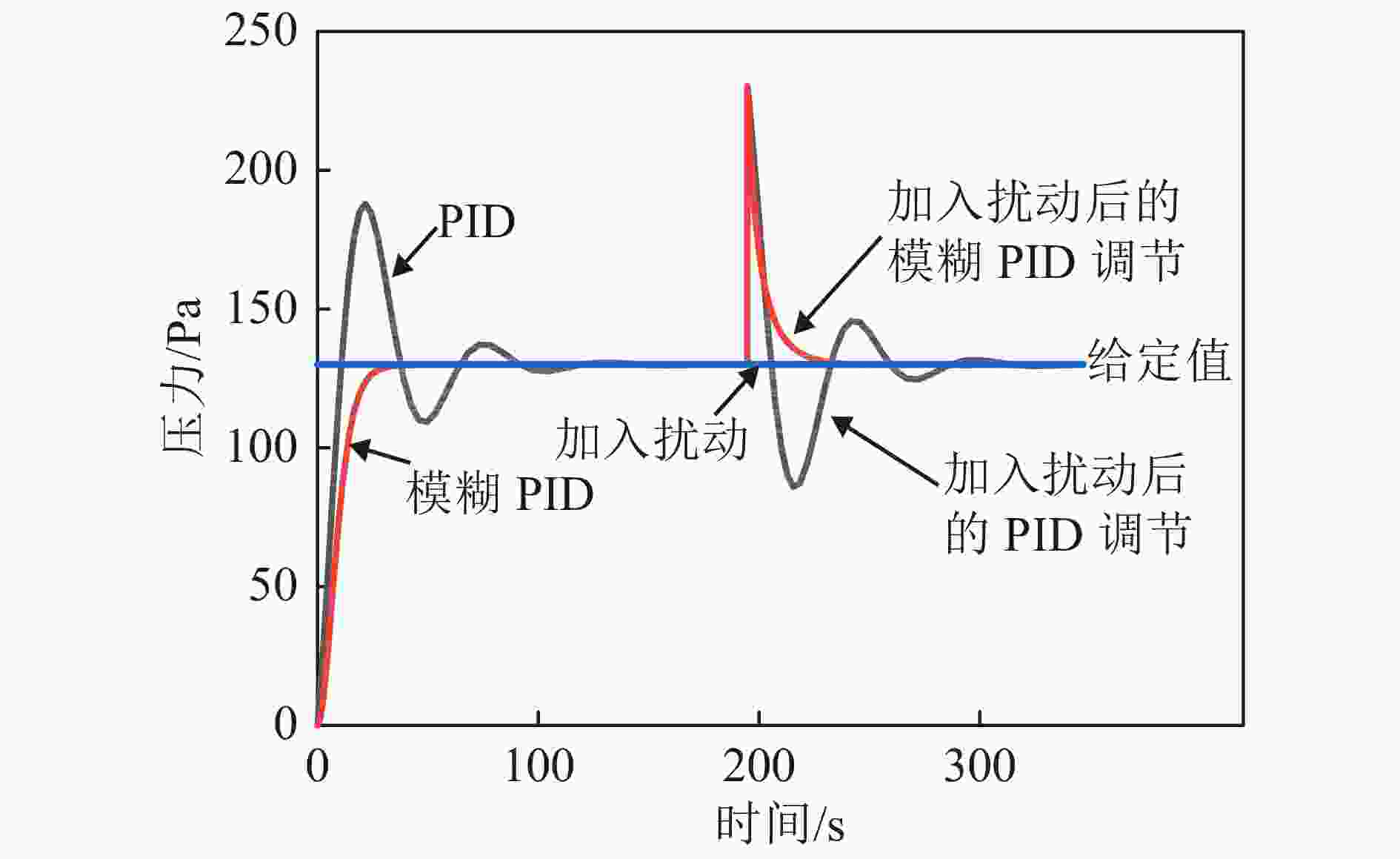
从图5中可以看出,在大惯性系统下对于突然的扰动,原有固定参数的PID,其超调量和稳态时间都会差于模糊PID控制下的效果,因此在2K控制系统的氦压调节中使用了模糊PID控制算法。模糊PID具有响应速度块、调节时间短、超调量小、抗干扰能力强等特点[6]。
模糊控制算法是建立在偏差e和偏差的变化率ec与
$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 之间的非线性函数,从而实现参数$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 、随着偏差e和偏差的变化率ec的变化而自行调整[6]。所以模糊控制器输出的$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 就是我们需要的PID控制器的输入,建立的模糊规则如表1所列。表中的e, ec的模糊子集:e, ec = {负大(NB, Negative Big),负中(NM, Negative Middle),负小(NS, Negative Small),零(ZO, Zero),正小(PS, Positive Small),正中(PS, Positive Middle),正大(PS, Positive Big)}。接下来根据每个参数的隶属度函数,再结合模糊规则得到PID参数模糊矩阵表,查出修正参数带入下式计算[6]:
其中
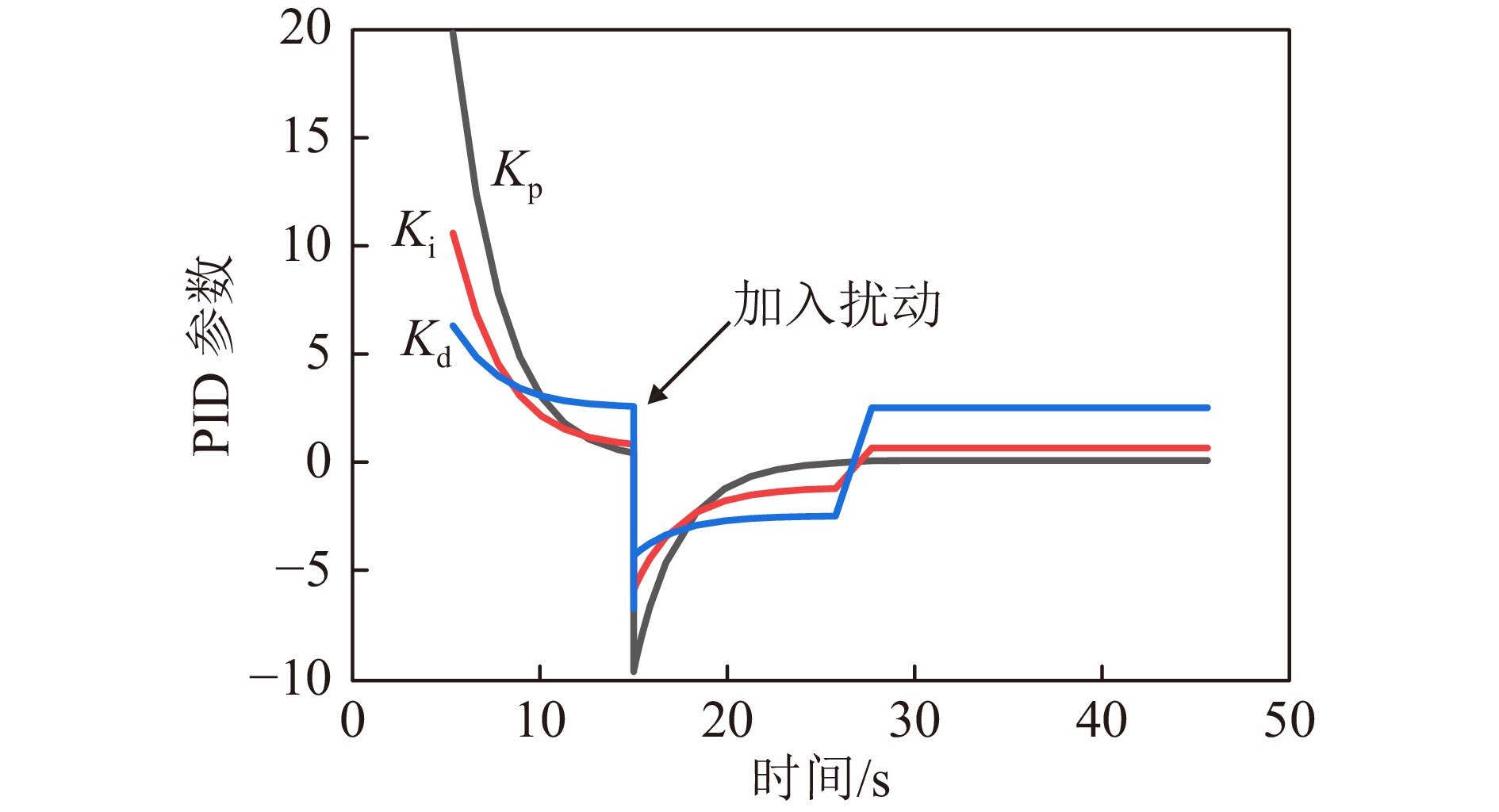
${K'}_{\mathrm{p}}$ 、${K'}_{\mathrm{i}}$ 、${K'}_{\mathrm{d}}$ 为前一个周期的PID参数;${e}_{j}、e{c}_{j}$ 为对应模糊表中的值;$ {q}_{\mathrm{p}} $ 、$ {q}_{\mathrm{i}} $ 、$ {q}_{\mathrm{d}} $ 为相应的修正系数;${K}_{\mathrm{p}}$ 、${K}_{\mathrm{i}}$ 、${K}_{\mathrm{d}}$ 为计算后的比例、积分、微分的值。PID NB(ec) NM(ec) NS(ec) ZO(ec) PS(ec) PM(ec) PB(ec) NB(e) PB/NB/PS PB/NB/NS PM/NM/NB PM/NM/NB PS/NS/NB ZO/ZO/NM ZO/ZO/PS NM(e) PB/NB/PS PB/NB/NS PM/NM/NB PS/NS/NM PS/NS/NM ZO/ZO/NS NS/ZO/ZO NS(e) PM/NB/ZO PM/NM/NS PM/NS/NM PS/NS/NM ZO/ZO/NS NS/PS/NS NS/ZO/ZO ZO(e) PM/NM/ZO PM/NM/NS PS/NS/NS ZO/ZO/NS NS/PS/NS NM/PM/NS NM/PM/ZO PS(e) PS/NM/ZO PS/NS/ZO ZO/ZO/ZO NS/PS/ZO NS/PS/ZO NM/PM/ZO NM/PB/ZO PM(e) PS/ZO/PB ZO/ZO/NS NS/PS/PS NM/PS/PS NM/PM/PS NM/PB/PS NB/PB/PB PB(e) ZO/ZO/PB ZO/ZO/PM NM/PS/PM NM/PM/PM NM/PM/PS NB/PB/PS NB/PB/PB 图6中显示的是在正常情况下突然加入扰动的时候模糊PID对
$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 的自调整。由图6可知,$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 在加入扰动时会有一个瞬时的变化,$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 的变化是一致的,比例环节$ {K}_{\mathrm{p}} $ ,根据偏差量成比例地调节系统控制量,减少偏差。$ {K}_{\mathrm{i}} $ 用于消除系统的稳态误差,提高系统的无差度,因为引入了扰动,积分环节进行调节,直至没有误差,积分调节停止,积分环节输出一个常量,所以在自调节过程中会有较大的变化。$ {K}_{\mathrm{d}} $ 根据偏差量的变化率调节系统控制量,具有预见性,能预见偏差变化的趋势,用于改善系统的动态性能,所以在引入扰动的那一刻会有很大的变化,之后由于PI的作用已经开始调节,控制变量的误差变化率开始变小,所以$ {K}_{\mathrm{d}} $ 的变化应该非常缓慢。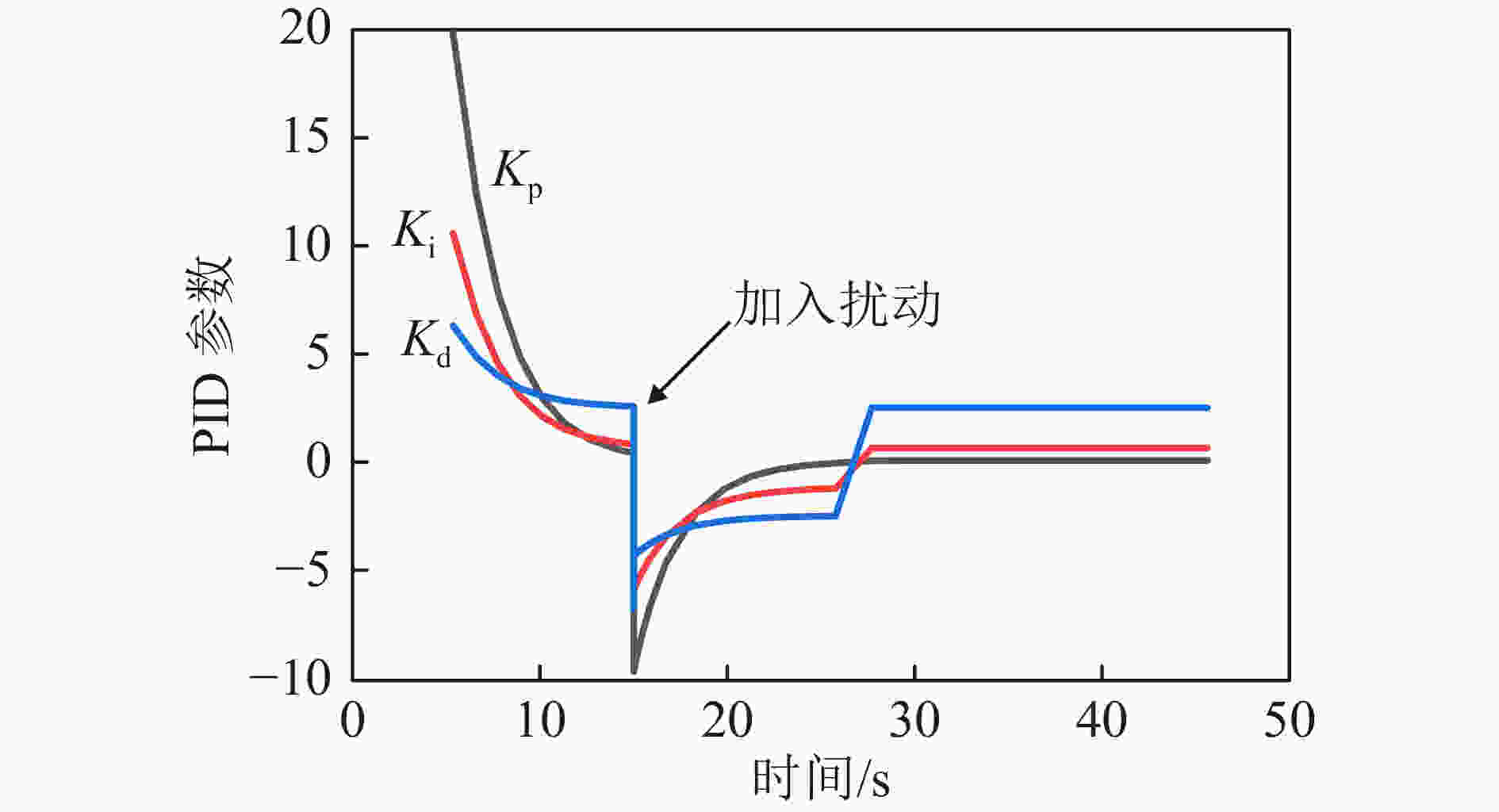
本文首先将模糊规则用脚本程序表示,然后利用evalfis函数将模糊规则控制表格导出,下面表2表示的是
$ {K}_{\mathrm{p}} $ 的查询表,$ {K}_{\mathrm{i}} $ 和$ {K}_{\mathrm{d}} $ 方法一样,在这里不做赘述[7]。Kp −6(ec) −5(ec) −4(ec) −3(ec) −2(ec) −1(ec) 0(ec) 1(ec) 2(ec) 3(ec) 4(ec) 5(ec) 6(ec) −6(e) 10 9 8 8 8 6 5 4 3 3 2 2 0 −5(e) 9 9 8 7 6 4 4 3 2 2 1 0 −1 −4(e) 8 8 8 7 6 4 3 2 2 1 1 −1 −2 −3(e) 8 7 7 6 5 3 2 2 1 0 0 −1 −3 −2(e) 8 6 6 5 4 3 2 1 0 0 −1 −1 −4 −1(e) 6 5 4 3 3 2 1 1 0 −1 −1 −2 −4 0(e) 5 4 4 2 2 1 1 0 −1 −1 −3 −3 −4 1(e) 5 3 2 2 1 1 0 −1 −1 −2 −3 −4 −5 2(e) 5 2 2 1 1 0 −1 −1 −2 −3 −5 −5 −7 3(e) 4 2 1 1 0 −1 −1 −2 −3 −3 −5 −6 −7 4(e) 3 2 0 0 −1 −1 −3 −3 −5 −5 −5 −6 −7 5(e) 2 1 0 −1 −2 −2 −3 −4 −5 −6 −6 −6 −8 6(e) 0 −1 −1 −2 −3 −4 −6 −6 −7 −7 −7 −8 −9 -
模糊PID控制算法需要在PLC中实现的,模糊推理部分如果直接采用PLC指令完成在线的推理,难度较大,同时程序执行会比较慢,实时性不强。所以采用西门子S1500系列PLC的软件中集成的PID的模块,可以直接调用,其中的输入参数
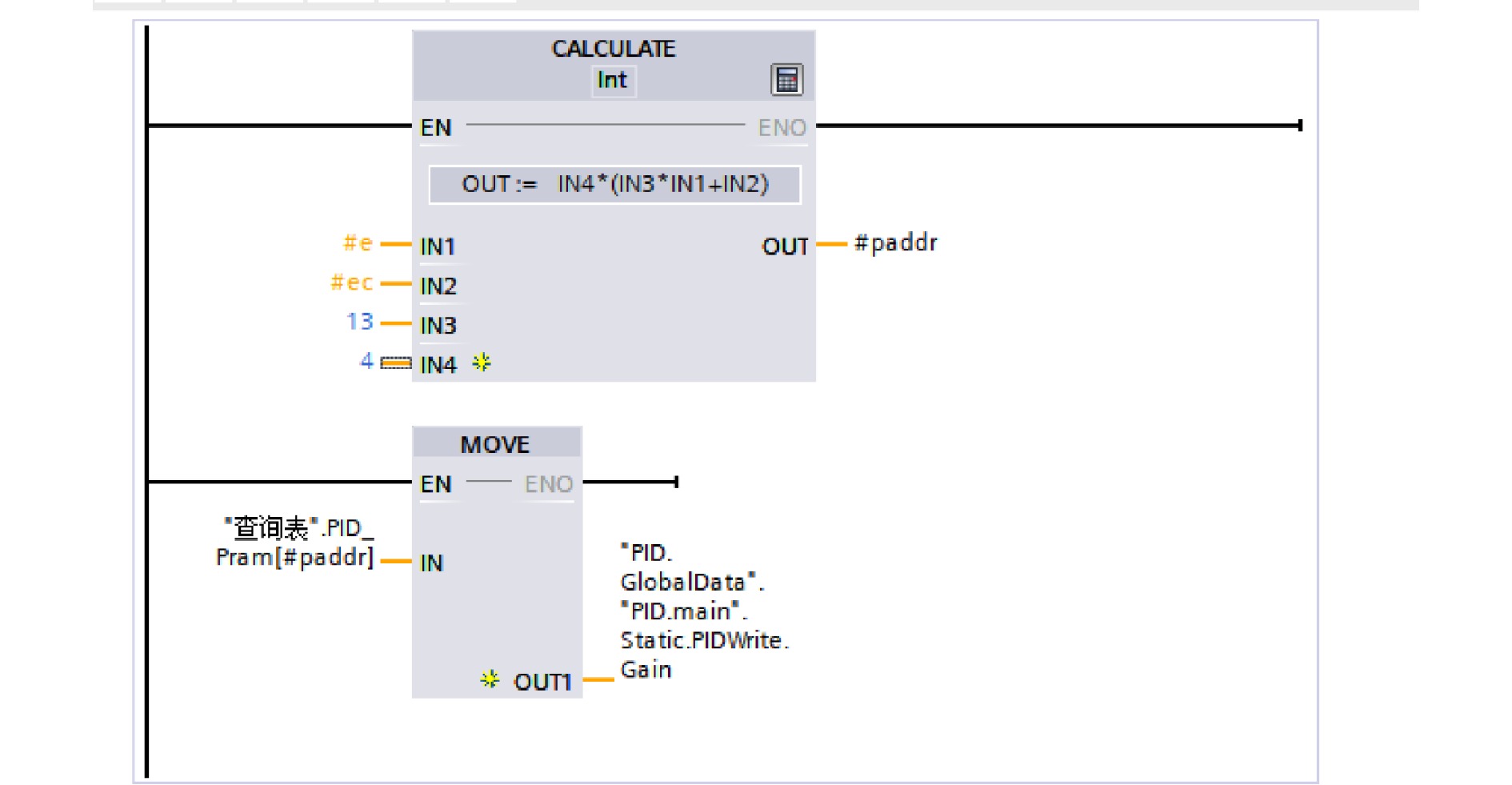
$ {K}_{\mathrm{p}} $ 、$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 可以根据软件搭建的2K控制系统的仿真模型,用模糊PID 规则得到查询表作为PID模块的输入,这样可以增强实时性。其中PLC程序可以完成对偏差e和变化率ec计算,根据这两个参数可以到查询表中查询具体的PID参数[8]。首先在PLC中建立一个DB全局数据块,并在数据块中建立一个数组存放查找表中的数据。将13×13表格放入到一维的数组中,先将e和ec的范围转换成[0, 12],则转换到数组中的具体位置为
$ v=13\times e+ec $ ,该位置就是偏移地址,PLC中一个实数存放为4个字节,得到的最终偏移地址为4v,对于相应的$ {K}_{\mathrm{i}} $ 、$ {K}_{\mathrm{d}} $ 实现方法也类似。具体实现如图7所示。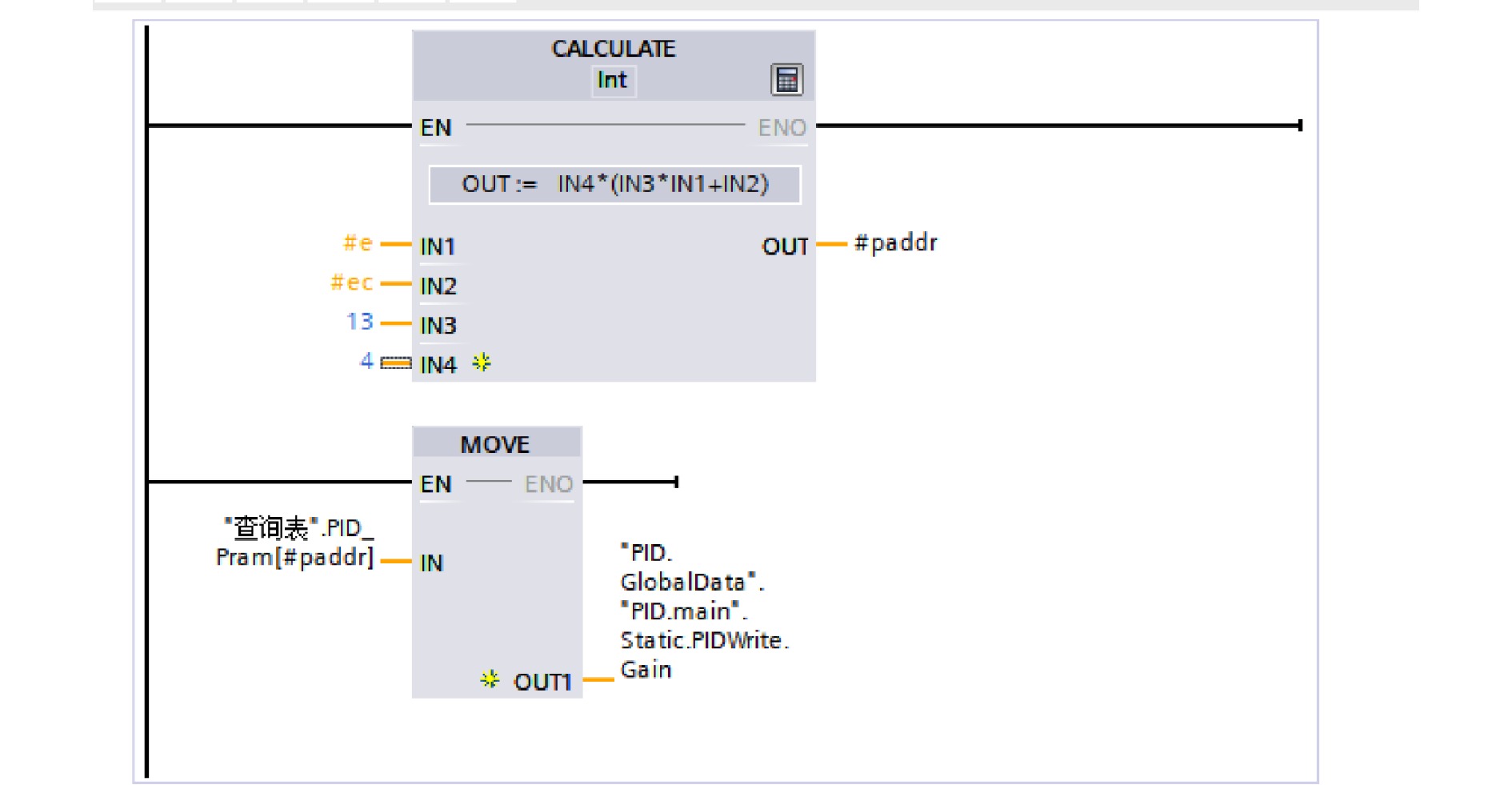
使用该算法在PLC中控制杜瓦回温过程内的压强实际变化如图8所示。
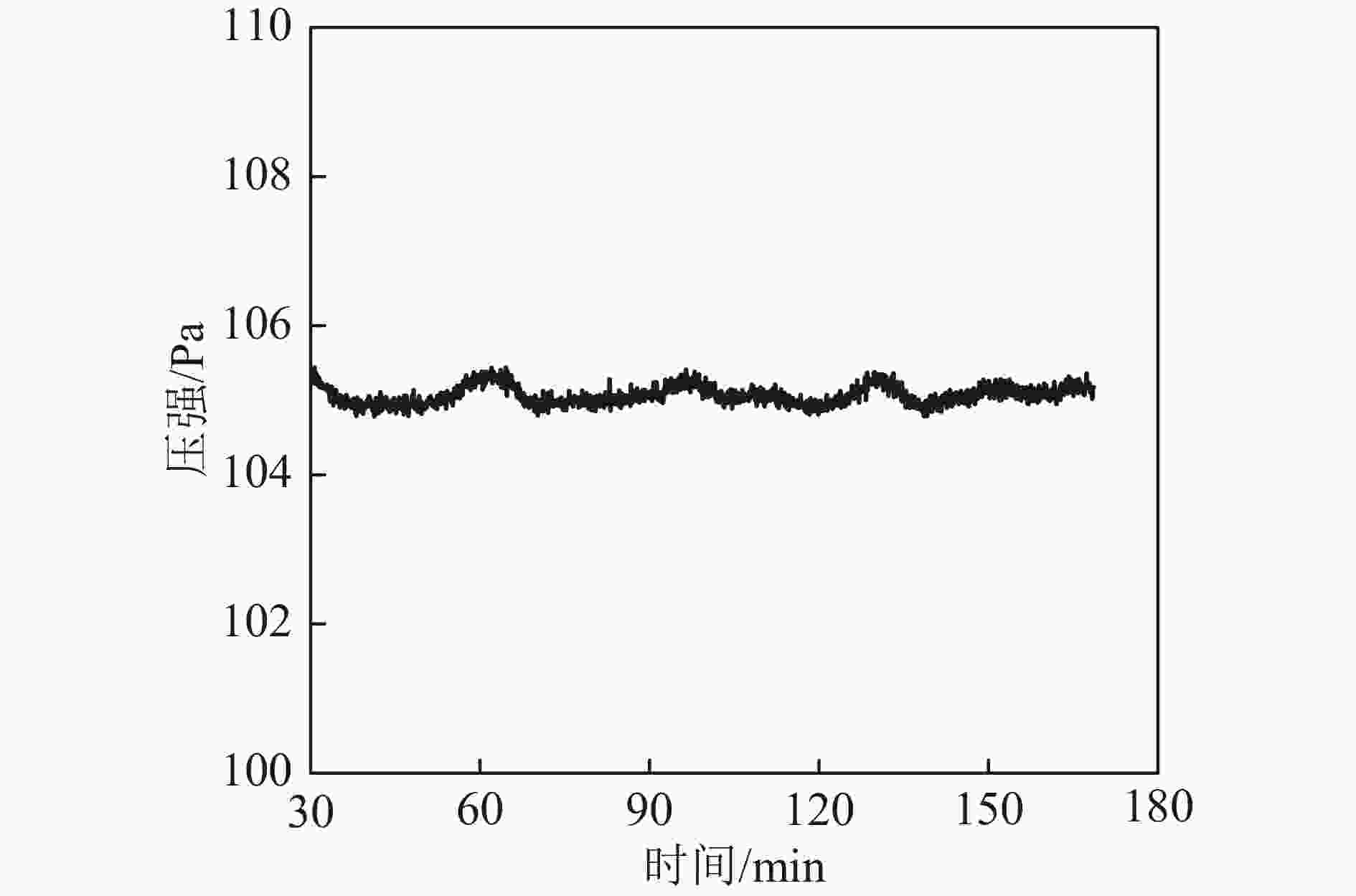
从图8中的结果可以看出,使用该控制方法,调节时间短、超调量小、稳定性较好。
-
本文主要针对2K低温垂测控制系统中的关键问题提出了解决方法,通过Sequencer实现了过程控制的有序切换,同时实现垂测过程的四个阶段:置换(包括氮置换和氦置换)、降温、运行和回温的自动化测试控制功能,实现了系统内泵组和所有阀门的远程控制和管道系统中真空度的回读,在数据呈现层实现了对杜瓦内液位、液氦和液氮温度的实时监测以及报警。同时利用PLC实现了模糊PID算法,提供了更好的控制杜瓦内压强稳定的方法,具有很好的借鉴作用。目前,系统在CAFe的调束实验中,为超导腔垂直测试提供稳定的环境。
The Key Technology of 2K Superconducting Cryogenic Vertical Measurement Control System
doi: 10.11804/NuclPhysRev.39.2021047
- Received Date: 2021-05-31
- Rev Recd Date: 2021-07-12
- Available Online: 2022-06-29
- Publish Date: 2022-06-29
-
Key words:
- 2 K superconducting cryogenic vertical measurement /
- control system /
- Sequencer /
- fuzzy PID /
- EPICS
Abstract: According to the requirements for the cryogenic vertical measurement system of the Chinese ADS Front-end Demo Linac(CAFe), a 2K superconducting cryogenic vertical measurement control system is designed. One of the main difficulties of the system is to achieve 2K process control in a simple and reliable way, and the other is the control of the pressure in the Dewar during the temperature recovery process. To address these two points, Sequencer, an integrated package in the Experimental Physical and Industrial Control System(EPICS), was used in the paper to implement control of sequential processes such as gas displacement and cavity cooling, enabling easy implementation of multiple process controls. For the temperature recovery process, components such as a Programmable Logic Controller(PLC) are used as the hardware control part, and fuzzy Proportion Integral Differential(PID) a control of the heater is used to stabilize the pressure in the Dewar. The smaller response time and overshoot compared to conventional PIDs ultimately provide a viable and efficient solution to achieve a 2K superconducting cryogenic vertical control system.
| Citation: | Guoqiang SHEN, Hai ZHENG, Hu CAO, Rongfeng ZHANG, Wenwen SHEN, Youxin CHEN. The Key Technology of 2K Superconducting Cryogenic Vertical Measurement Control System[J]. Nuclear Physics Review, 2022, 39(2): 188-194. doi: 10.11804/NuclPhysRev.39.2021047

|













































 甘公网安备 62010202000723号
甘公网安备 62010202000723号 DownLoad:
DownLoad: